PROTOTYPES
試作品・開発中の物ですが,御要望があれば販売いたします.
カスタマイズ等も承りますのでお気軽にご相談ください.
■ 機構
【詳細】 |
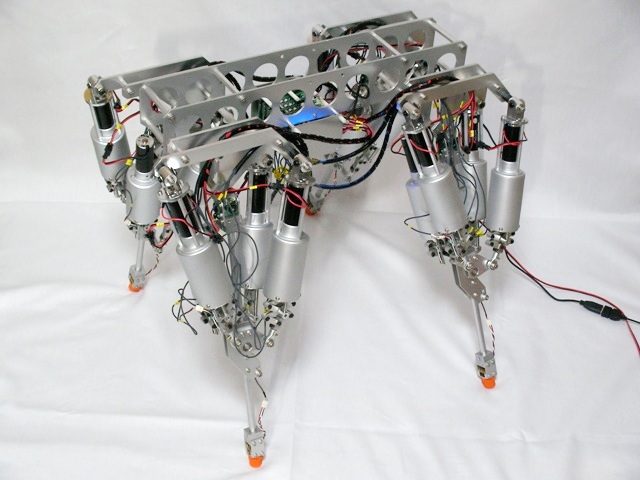
4脚ロボット
可変剛性アクチュエータを使用した4脚ロボットの試作品です.
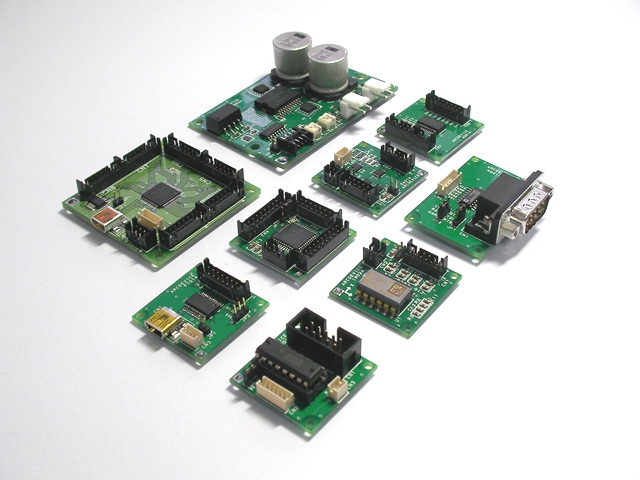
各脚3自由度で合計12自由度,16台のアクチュエータで駆動します. 制御回路は連結型基板を使用しています. |